Human-Robot Site Survey Project
The goal of the Human-Robot Site Survey Project is to develop robots that can perform mapping and surveying tasks over a wide area. Unlike goal-directed traverses and isolated sampling tasks, such as those carried out by the Mars Exploration Rovers (MER), site survey requires systematic area coverage and long duration operations in a geographically bound region. This makes the operational modes previously used for planetary rovers inappropriate for survey.
To address this need, the Intelligent Robotics Group is developing a system for performing systematic site surveys with robots. Our approach combines information from orbital and descent imagery with surface activity of robots equipped with survey instruments. A typical scenario involves multiple robots autonomously surveying a region while humans supervise and assess data from a remote location, either: (1) a nearby habitat/vehicle (Intra-Vehicular Activity) with high-bandwidth, low-latency communications or (2) from ground control via bandwidth-constrained, time-delayed satellite communications.
Field Test Overview
The purpose of the 2007 Haughton Crater Site Survey Field Test is to field test operational concepts for systematic, wide-area surveying and mapping. Two NASA Ames K10 robots will be used to perform a robotic survey of several simulated lunar sites in Haughton Crater, including a roughly 700m x 700m region called "Drill Hill". Satellite images will be used to designate initial areas of interest for mapping tasks and robot data will be used to refine mapping tasks at a simulated lunar habitat (located at the Haughton-Mars Project Base Camp) and simulated ground control (located at the NASA Johnson Space Center). This field test is being conducted as part of the 2007 activities of the Haughton-Mars Project (HMP).

Drill Hill test site in Haughton Crater
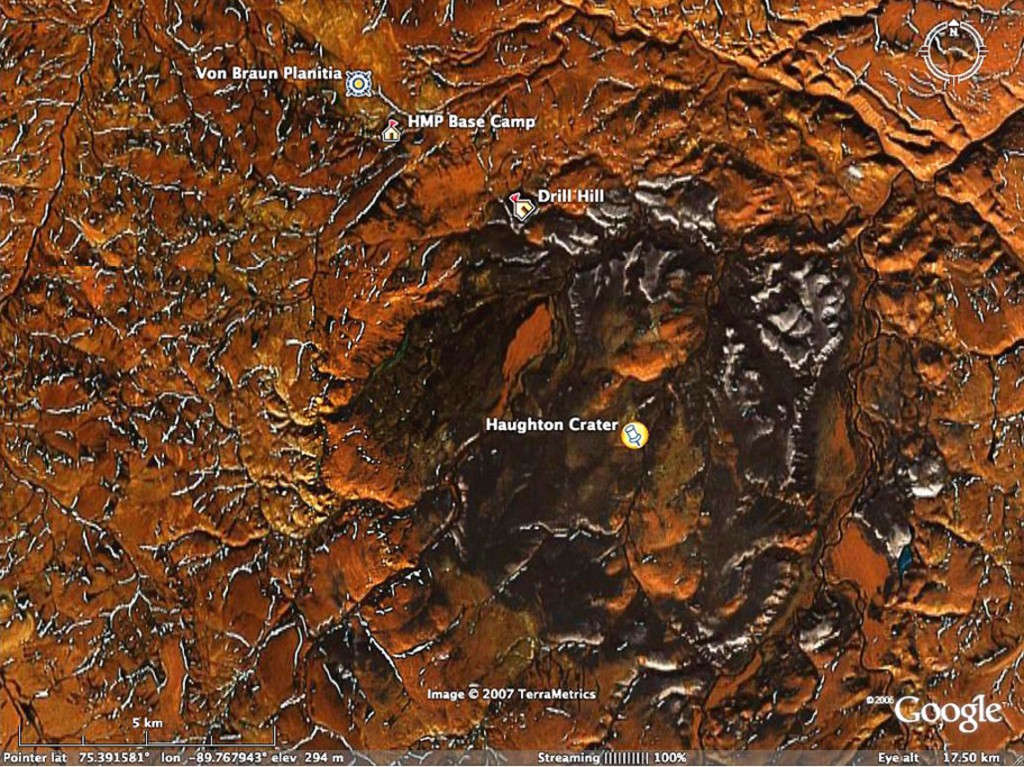
Map of Haughton Crater
The baseline for rover operations is to remotely command and monitor the K10 survey from the Haughton-Mars Project Base Camp. The field team will operate in a simulated lunar surface activity mode, using the base camp to simulate intra-vehicular activity from a pressurized vehicle or habitat. Two desktop computers will be used as operations consoles and will display several user interfaces including Google Earth (for monitoring overall rover trajectory) and the NASA Ames Viz Explorer (for monitoring rover state and visualizing survey data). We will employ remote monitoring and basic vehicle teleoperation from a simulated ground control facility at NASA Johnson Space Center (JSC).
Field Test Objectives
The primary objectives for this field test are:
- Test operational concepts and systems for robotic site survey in a lunar analog environment. This includes instruments and software from NASA Ames, JPL, JSC, and Optech.
- Demonstrate systematic, comprehensive, wide area mapping with multiple rovers.
- Demonstrate rover mission operations that differ significantly from past planetary rover science operations. This includes: simultaneous operation of two robots, high fidelity visualization/interaction of rover activity and acquired data, Google Earth display of rover position and acquired data, and high-level survey tasking.
- Provide real-time visualization and status updates to the public via the Web (daily logs) and Google Earth (dynamic KML).
- Produce wide-area topographic map (digital elevation model) that covers at least 50% of the survey site with at least 10 cm resolution (high enough resolution to enable K10 traverse planning).

Visualizing rover activity in Google Earth
Robotic Site Survey System
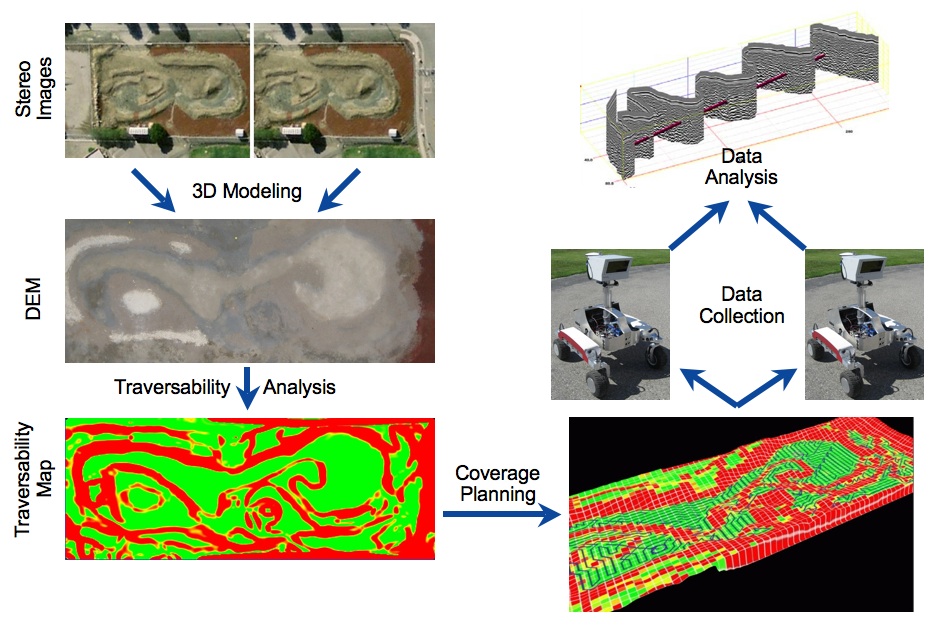
IRG's robotic site survey system involves three phases: preparation, execution, and analysis. In the preparation phase, we perform 3D terrain modeling using overhead (aerial and/or satellite) imagery of the survey zone, which has a resolution (20-50 cm) similar to what will be acquired by the Lunar Reconnaissance Orbiter. We then perform a traversability analysis to distinguish safe terrain (regions the survey rover can traverse) from hazardous terrain (regions the survey rover must avoid). During the second phase, the traversability map is processed by a survey coverage planner, which calculates survey points. We employ a global task executive to command a robot to drive to each survey point and acquire data. The resulting data is then stored in a database for post-survey analysis.

NASA Ames K10 rover (third-generation)
During this field test, we will use a third-generation K10 rover equipped with survey instruments. K10 is designed to operate in a wide range of environments, from high-friction indoor to moderate natural outdoor (30-degree slope, hard-packed dirt), at human walking speeds (up to 90 cm/s) and over 20-cm step obstacles. The third-generation K10 measures 1.3 m (height) x 0.9 m (width) x 1.0 m (length) and weighs 125 kg (including a 50-kg payload). The rover is equipped with a variety of sensors for navigation, including a carrier-phase differential GPS, electronic compass, stereo vision, and a 2D laser scanner. On-board avionics include power conditioning and management, and wireless communications. K10 is powered by Li-Ion batteries, which can be "hot swapped" to enable continuous, long-duration operation. The on-board rover controller runs on a dual-core Pentium laptop (under RedHat Enterprise Linux 4). The controller strongly emphasizes modularity, high-level interfaces, middleware (CORBA), and makes use of the NASA CLARAty reusable robotic software framework.

Display of CRUX ground penetrating radar data in Viz Explorer
For the Haughton Crater surveys, K10 will carry two non-contact survey instruments: (1) the CRUX ground-penetrating radar (to characterize subsurface structure) and (2) an Optech ILRIS-3D scanning lidar (for high-resolution topographic mapping). Developed for the lunar Construction and Resource Utilization Explorer (CRUX) project by NASA JPL, the CRUX ground-penetrating radar (GPR) is optimized for lunar prospecting; it has relatively shallow penetration (approximately 5-10m depth) and high resolution (15 cm). The GPR is a short-pulse type system operating at 800 MHz (center frequency), which responds to interfaces between materials of differing dielectric permittivity. Optech's Intelligent Laser Ranging and Imaging System (ILRIS-3D) is a laser-based imaging and digitizing system designed for commercial survey, engineering, and mining. The ILRIS-3D lidar is approximately the size of a survey "total station" and has a large dynamic range: from 3 m to more than 1,500 m. Prior experiments at Haughton Crater have found that lidar can be helpful for characterization and analysis of remote geological formations.
For more information, please see:
-
Robotic Site Survey at Haughton Crater
9th International Symposium on Artificial Intelligence, Robotics, and Automation in Space (iSAIRAS), February, 2008. -
Simulated Lunar Robotic Survey at Terrestrial Analog Sites
38th Lunar and Planetary Science Conference, No. 1487, March, 2007. -
Human-Robot Site Survey and Sampling for Space Exploration
AIAA Space 2006, September, 2006. -
Lessons from Applying Modern Software Methods and Technologies to Robotics
Workshop on Software Development and Integration in Robotics: Understanding Robot Software Architectures, ICRA 2007, April 2007. -
Extensible Hardware Architecture for Mobile Robots
ICRA 2005, April 2005.