Technology Transfer - Technology: Navigation
Page Content
Autonomous Collision Avoidance Navigation System
SSC Atlantic – Patent Pending
This patent will autonomously control an Unmanned Surface Vehicle (USV) in compliance with the COLREGS Rule 19(d) regarding “Conduct of Vessels in Restricted Visibility” that must be obeyed when navigating on open water. This software was built using fuzzy logic mathematical rules. This patent provides an advantage in that in addition to assigning the USV a mission to go from Point A to Point B, the USV can operate as if a “Captain” were onboard and making autonomous navigation decisions using a route tracking algorithm, detecting an obstacle’s bearing, speed, distance, and direction of travel with respect to the ownship, then changing speed and ownship heading to change course, the resume the route tracking algorithm when the obstacle is cleared from probable collision.

--------------------
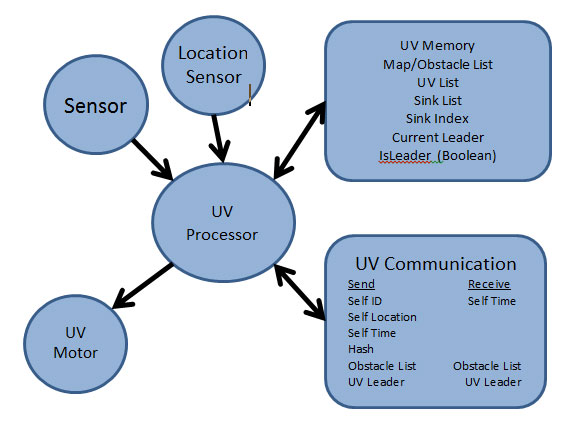
Robust method for decentralized, multiple unmanned vehicle navigation and formation control in EM-spectrum limited environment.
SSC Atlantic – Patent Pending
This novel approach to path planning takes into account a communications restrained environment and dynamic formation control of multiple unmanned surface vehicles (USV) for navigation around obstacles. Multiple USVs can provide a Common Operational Picture and environmental surveillance that would be highly beneficial for cooperative intelligent decision-making in the absence of human interaction. This patent is tolerant of individual system failure, including either a universal or isolated communications failure, without depending on a single node (in some cases referred to as a “reach back” node) for instruction, position, navigational, or timing data. This solution is a combination of long range path planning, short range obstacle avoidance, resilient ad-hoc communication network, and decentralized control strategy.
Contact Us - Email: ssc_lant_t2@navy.mil - Phone: 843-218-3495