|
|
| MISSION | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Entry, Descent, and Landing
The entry, descent, and landing (EDL) phase began when the spacecraft reached the Martian atmosphere, about 125 kilometers (about 78 miles) above the surface, and ended with the rover safe and sound on the surface of Mars at 10:32 p.m. PDT on Aug. 5, 2012 (1:32 a.m. EDT on Aug 6, 2012). Entry, descent, and landing for the Mars Science Laboratory mission included a combination of technologies inherited from past NASA Mars missions, as well as exciting new technologies. Instead of the familiar airbag landing of the past Mars missions, Mars Science Laboratory used a guided entry and a sky crane touchdown system to land the hyper-capable, massive rover. The sheer size of the Mars Science Laboratory rover (900 kilograms or over 2,000 pounds) precluded it from taking advantage of an airbag-assisted landing. Instead, the Mars Science Laboratory used the sky crane touchdown system, which is capable of delivering a much larger rover onto the surface. It placed the rover on its wheels, ready to begin its mission at Gale Crater. The new entry, descent and landing architecture, with its use of guided entry, allowed for more precision. Where the Mars Exploration Rovers could have landed anywhere within their respective 150 by 20 kilometers (about 93 miles by 12 miles) landing ellipses, Mars Science Laboratory landed within a 20-kilometer (12-mile) ellipse! This high-precision delivery will open up more areas of Mars for exploration and potentially allow scientists to roam "virtually" where they have not been able to before. The entry, descent and landing sequence breaks down into four parts:
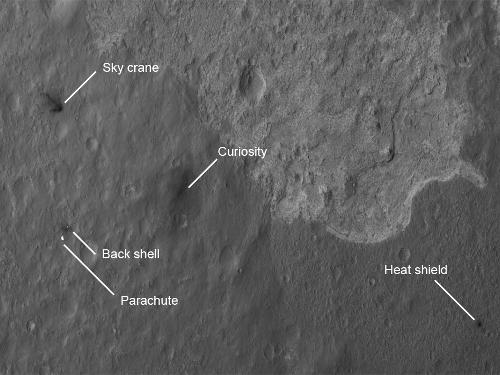
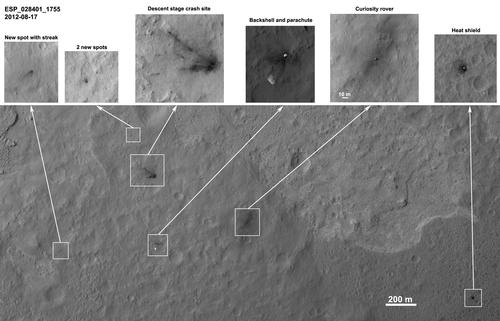 Orbiter View of Curiosity From Nearly Straight Overhead Details such as the shadow of the mast on NASA's Mars rover Curiosity appear in an image taken Aug. 17, 2012, by the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter, from more directly overhead than previous HiRISE images of Curiosity. |