|
Sampling System
The Sample Acquisition, Processing, and Handling (SA/SPaH) subsystem is responsible for the acquisition of rock and soil samples from the Martian surface and the processing of these samples into fine particles that are then distributed to the analytical science instruments, SAM and CheMin. The SA/SPaH subsystem is also responsible for the placement of the two contact instruments, APXS and MAHLI, on rock and soil targets. SA/SPaH consists of a Robotic Arm (RA) and turret-mounted devices on the end of the arm, which include a drill, brush, soil scoop, sample processing device, and the mechanical and electrical interfaces to the two contact science instruments. SA/SPaH also includes drill bit boxes, the Organic Check Material (OCM), and an observation tray, which are all mounted on the front of the rover, and inlet cover mechanisms that are placed over the SAM and CheMin solid sample inlet tubes on the rover top deck.

Diagram showing the location of the SA/SPaH components on the rover. This is an older configuration with three spare drill bit boxes; the current design has two.
The Robot Arm (RA) is a 5 degree-of-freedom manipulator that is used to place and hold the turret-mounted devices and instruments on rock and soil targets, as well as manipulate the turret-mounted sample processing hardware. The 5 degrees of freedom are provided by a set of rotary actuators known as the shoulder azimuth joint, the shoulder elevation joint, the elbow joint, the wrist joint, and the turret joint. The joints are connected by structural elements with long links connecting the shoulder and elbow joints (known as the upper arm link) and connecting the elbow and wrist joints (known as the forearm link). When fully extended straight ahead in the rover forward drive direction, the center of the turret of the robotic arm is 1.9 m from the front of the rover body.
At the end of the RA is the turret structure on which 5 devices are mounted. The outer diameter of the turret plus the installed devices is 60 cm. Two of these devices are the science contact instruments APXS and MAHLI. The remaining three devices are associated with sample acquisition and sample preparation function: the Powder Acquisition Drill System (PADS), Dust Removal Tool (DRT), and the Collection and Handling for Interior Martian Rock Analysis (CHIMRA). The robotic arm can meet its positioning requirements for targets inside a volume called the robotic arm workspace. The workspace volume is an upright cylinder 80 cm diameter, 100 cm high, positioned 105 cm in front of the front body of the rover, and extending to 20 cm below the surface when the rover is on a smooth flat terrain.
In order to place and hold these turret-mounted devices on rock and soil targets, the current design of the RA is capable of exerting large forces between the turret-mounted hardware and the rock or soil surface. In particular, these large forces are required to stabilize the drill against a rock target in order to keep the device from “walking” across the surface of a rock when first engaging the rock surface with the cutting bit. The RA achieves this function by first placing the drill against the rock surface and then “overdriving” the actuators so that the entire system winds up against the overall stiffness of the RA. The sizing of the RA actuators allows this mechanism to produce more than 240 N at the tip of the arm in certain arm configurations. During motion, the tip speed of the RA is expected to be on the order of 1 cm/sec.

Diagram showing the turret-mounted devices on the end of the robotic arm: drill, brush, soil scoop, sample processing device (sieves, portioners), and the two contact science instruments, APXS and MAHLI. The devices are connected to the arm by the component shown in red on the underside of this drawing.
The PADS is the device that is responsible for acquiring powdered rock samples from up to 5 cm inside the surface of a rock. When the RA places and holds the drill bit against a rock surface with 240 to 300 N axial load, the PADS can then acquire the rock sample without requiring any motion of the RA. The PADS has the following capabilities: (a) translate the drill bit down and into the rock surface, (b) rotate the drill bit (0 to 150 rpm) in order to cut the rock material, (c) provide voice-coil percussion (1800 bpm, 0.4 to 0.8 J impact energy) to the drill bit for drilling and powdering of rock sample, and (d) exchange the drill bit from the drill. The drill both penetrates the rock and powders the sample to the appropriate size for analytical instrument use. The powder travels up an auger in the drill and into a chamber with a transfer tube connection to the CHIMRA processing unit. Movement of the powder through CHIMRA is driven by gravity (by changing the position and orientation of the robotic arm) and vibration.
The diameter of the hole in a rock after drilling is 1.6 cm in diameter and up to 5 cm deep, depending on the surface topography of the rock. Material from the upper ~1.5 to 2 cm of the drill hole is deposited on top of the rock surrounding the drill hole and does not make it into CHIMRA and the Analytical Laboratory instruments. Below this depth, the sample acquired is transferred to CHIMRA for sieving and portioning.
The grain size distribution of the drilled powder and the temperatures to which the powder is heated during drilling will depend on the nature of the rock being drilled, the final drill design and performance, and operating parameters selected for use on Mars (rotation and percussion parameters, on-off cycles, etc). Tests so far on prototype drills over a range of operational parameters and rock types have yielded samples with ~90% of the bulk material generated by the drill capable of passing through a 150-micron sieve and 100% passing through a 1 mm sieve. Heating of the sample appears to be minimal, but tests have yet to be done to understand the likely degree of heating on Mars.
In the course of gathering a sample, it is possible the rover arm might slip, resulting in non-nominal torques on the bit while in contact with a rock. This might cause the bit to become stuck in the rock, and if this happens, the drill can disengage from the bit and SA/SPaH can reload another bit. Also during the life of the mission, if the drill is used on particularly hard material such as coarse-grained quartz-rich rocks, the bit might wear down and become unusable. As such, the drill is capable of exchanging bits with two extra spare bits located in containers called “bit boxes” on the front of the rover. Once the drill has discarded a worn bit, the robotic arm will be used to position the drill relative to a new bit and autonomously engage and capture the spare bit onto the drill stem. Testing so far has shown that prototype versions of the drill can penetrate rocks as hard as massive fine-grained basalt without substantial wear on the drill bit.
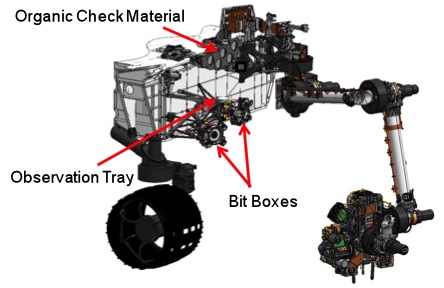
Diagram of a portion of the front of the rover, showing the location of the two bit boxes, observation tray above the bit boxes, and the five organic check material canisters.
Soil samples are acquired with CHIMRA’s clam-shell scoop mechanism, which can collect loose soil material from depths of up to 3.5 cm. The scoop can also collect unconsolidated samples from rover wheel-dug trenches, depending on the geometry of the trench, which might access material as deep as ~20 cm below the original surface. (Also, depending on the geometry of the trench, APXS and/or MAHLI can be used to examine the material in a trench). The volume of a scooped soil sample is expected to be between 1000 and 30,000 mm3.

Diagram of CHIMRA, showing the scoop in an open position (indicated here in red).
The CHIMRA is a device that sieves and portions the samples from the scoop and the drill which are then distributed to the analytical instruments, SAM and CheMin. Various chambers and labyrinths within the mechanism are used to sort and sieve the drilled rock or scooped soil material. This sorting function is carried out by rotating the robotic arm turret actuator with respect to the gravity vector. In addition to the scoop actuator, the CHIMRA also carries a vibration actuator that helps to facilitate material movement within the CHIMRA and also during the delivery action when the CHIMRA drops material into the instrument inlets.
The CHIMRA provides mechanisms for sieving particles to less than 150 microns, mixing the samples that pass through the 150-micron sieve, and portioning the samples into the appropriate volume (45 to 65 mm3 per portion) for distribution to the SAM and CheMin instruments. When using the 150-micron sieve, it is expected that the CHIMRA will typically generate sufficient quantity of sieved material for at least 6 total portions, if more than one is desired (3 portions are intended to be available per instrument). The CHIMRA also provides the capability for sieving particles to less than 1 mm and portioning that material into an appropriate volume for distribution to the SAM instrument (45-130 mm3 per portion). CheMin cannot be given this type of coarser-grained sample because the particles are too large for its sample cells. When using the scoop and 1 mm sieve, only one portion can be generated per scoop. The sieves are mounted to mechanisms that impart shock into the sieves to clear and clean the sieve screens to help prevent cross contamination and minimize sieve clogging throughout the mission life.
Instrument Inlet Covers
The SA/SPaH subsystem also provides covers that protect the SAM and CheMin solid sample inlets from being contaminated by particulates from the atmosphere or rover deck. These covers are mounted on top of each solid sample inlet and are opened and closed using a motor for each one. During sample delivery, the instrument inlet cover is opened and the CHIMRA sample chamber is then positioned over top of the exposed solid sample inlet. Once the CHIMRA has dropped the sample into the solid sample inlet, the inlet cover is closed.
Dust Removal Tool (DRT)
The Dust Removal Tool (DRT) is mounted to the turret of the robotic arm and can be used to remove the dust and loose material off of rock surfaces by clearing it away with stainless steel wire brushes. The design of the DRT is different from the Rock Abrasion Tool brushes on the Spirit and Opportunity rovers, but is expected to have a similarly effective dust removal capability. A single actuator mechanism rotates the brushes and relies on the robotic arm to position it at a desired standoff distance from a target surface. The area to be cleared with the DRT has a minimum circular area of 45 mm diameter. The DRT is also expected to be used to clear off loose material from the observation tray.

Diagram showing the design of the DRT, from two different view orientations.
Observation Tray
An observation tray is provided to allow processed samples delivered by CHIMRA to be observed by APXS and MAHLI. The design is not final at the time of writing this document, but current plans are that it will be a simple, flat titanium metal tray ~7.3 cm diameter, mounted on the front of the rover. Soil and rock samples that have passed through the 150-micron sieve of CHIMRA can be deposited on the tray, observed by the APXS and MAHLI, and subsequently removed from the tray by the DRT brushes. After delivering sieved material (soil or rock) to SAM and/or CheMin, the remainder of the sieved material can be analyzed in this way. There may be other options for use of the tray (such as delivery of scooped soil passing the 1 mm sieve to the tray), but none can be guaranteed at this time.
Organic Check Material
Steps have been taken to ensure that the SAM measurements of soil and rocks on Mars do not contain terrestrial contaminants above the SAM detection levels. However, it is likely that a slight amount of terrestrial contamination may be present despite our best efforts. To assess the characteristics of organic contamination at five different times in the mission, five bricks of Organic Check Material (OCM) mounted in canisters on the front of the rover will be available for end-to-end sample handling tests on Mars. Each OCM brick can be drilled, sieved and portioned in CHIMRA, and delivered to SAM (and optionally also to CheMin), with the OCM drilled powder following the same pathway as for drilled Martian rocks. Each brick is made of porous amorphous silicon dioxide ceramic with 30% interconnected porosity. The bricks are doped with a low concentration of 3-fluorophenanthrene and 1-fluoronapthalene, which are synthetic organic compounds not found in nature on Earth and not expected on Mars. Each of the bricks is sealed in its own canister and under vacuum until it is drilled into on Mars.
Each OCM canister is intended to be sampled only once, since breaking the seal permits an unknown level of reactivity between the brick and the Martian environment, resulting eventually in a sample no longer known to be a calibrated control. Contamination buildup on the outer surface of the sealed canister is not a concern, since the upper ~1 cm of brick drilled into will not go into CHIMRA. SAM measurements on Mars of the delivered OCM samples will be used to check whether SA/SPaH transfers terrestrial organic contamination to the samples; whether organic volatiles are lost by the process of acquisition, portioning, and distribution of samples; and whether complete sample portions have been delivered to SAM sample cups. Although the OCM material is X-ray amorphous, it could be used to check the level of end-to-end cross contamination on Mars from sample to sample in CheMin, by looking for residual XRD pattern features or residual XRF element peaks (residual from previously acquired samples) in an OCM-filled sample cell.
|


