
John
Shutske, Bill Gilbert, Jonathan
Chaplin, Paul
Gunderson
University of Minnesota Extension Service
This part of the project focused on the development of a sensor system to detect the presence of a person near a dangerous machine component. If this system proves reliable, it could be used with devices such as magnetic clutch/brakes to rapidly arrest the motion of the equipment. Some tractors are now available with electrohydraulic PTO control, which could include a sensor system such as this one in a chain of safety shutoff interlocks.
Beginning
in late 1994, project staff including faculty and students
conducted a review of various sensor categories for the purpose
of detecting people approaching a hazard area. The data suggested
that the overlapping use of passive infrared and microwave
sensors might have potential value for use on agricultural
equipment.
Since
there are many off-the-shelf motion sensors already available
to the building security industry, it made sense to start
by evaluating them on equipment operating in stationary mode.
A large number of injuries occur on power equipment such as
silage elevators, and field equipment parked for unclogging,
and could be prevented using these inexpensive sensor technologies.
During
the winter of 1996-97 a data acquisition system was developed
and assembled to test sensors mounted on a tractor, generating
performance data which can be analyzed statistically and examined
for correlations to test conditions. For each set of conditions,
two modes of testing were employed. Sensors were first tested
both for the speed and reliability with which they detected
a human moving into the protected area, and second, for susceptibility
to false alarms.
The system
allows for the use of multiple sensors simultaneously, and
repetitive passes are used to generate statistical data on
reliability. Using Boolean logic, it is possible to test various
combinations of sensor outputs for effectiveness in minimizing
false alarms (i.e. two or more sensors must go into an alarm
condition before the overall multi-sensor system goes into
an alarm condition).
The heart
of the the test system consists of an IBM ThinkPad 486-100
laptop computer and an IOtech DaqBook100 data acquisition
board connected to the parallel printer port. Test programs
(Virtual Instruments) written using National Instruments LabVIEW
communicate with the DaqBook, providing the operator interface
panel and data storage to delimited text files. Solid state
relays were used to protect the CMOS TTL discrete I/O
ports of the DaqBook. Approach velocity and position of the
human test subject were monitored using a PSI-TRONIX DVT-500
linear motion transducer. The system was powered by a pair
of 12 volt lead/acid gel cell batteries and mounted on an
IH 986 tractor.
Sensors
were mounted on a rail along the
rear of the tractor aimed toward areas that a person would cross
through if approaching a rotating PTO shaft attached to an implement.
To allow fast and easy changes in positioning and aiming, the
rail is drilled on two inch centers and sensors are mounted
using ballheads designed for
use on camera tripods.
 |
Sensor
mounting rail on rear of tractor. |
 |
Sensors
mounted using ballheads designed for use on camera tripods.
|
In the
tests reported in this paper, a Gehl self-unloading forage
wagon was used as the PTO driven stationary implement. The
zone to be protected included an envelope extending from the
outer surfaces of the tractor's rear wheels extending from
the rear surface of the tractor to the front face of the wagon.
Figure below shows this configuration.
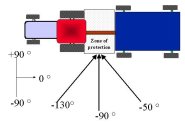 |
Diagram
showing protected zone between tractor and wagon. |
As test
subjects approached the potential hazard area, their velocity
and position were recorded using a 500 inch linear
motion transducer. This device consisted of a cable (attached
to the person's belt) reeled from a spring-loaded drum coupled
to a potentiometer and a DC generator, providing voltage outputs
as a function of position and instantaneous velocity. Resolution
of this system was limited by the analog input capabilities
of the DAQBOOK to +/- 0.25 inches for position and +/- 0.1
inches per second for velocity.
 |
Test
subject Ryan entering hazard area while trailing measurement
cable
(not visible) from position/velocity transducer at lower
left |
 |
Ryan
approaching hazard area. |
 |
500
inch position/velocity transducer showing spring tensioned
cable. |
 |
Jon
operating data acquisition system |
A sample
output screen from the
data acquisition and control system is shown below. A "pass"
was defined as a single approach toward the hazard area on a
pre-defined straight-line path. Multiple "runs" were
performed, each consisting of 30-50 passes which shared a given
set of conditions. For each separate run, test conditions were
logged in notebooks. These included sensor position, approach
angle of the person with respect to the hazard, temperature,
sunlight condition, ground surface qualities, and other important
environmental parameters.
Ten times
per second, from the start of the pass until one second after
detection, the software sampled the sensor status, the velocity
and position of the test subject relative to the hazard, and
warning time. The warning time was calculated by dividing
the distance remaining between the approaching person and
the hazard at the time of detection by their maximum velocity
during the one-second preceding detection. This calculated
time is important since it provides an indication of the amount
of time available to respond to the signal (such as shut down
or warning) before the human reaches the hazard. For each
pass, at the moment of detection, the system latched the readings
and logged them to a file which summarized the results of
the entire test run. In addition, the system logged time-stamped
raw data for all passes to a separate file for detailed examination
if needed.
The first
round of testing completed during summer 1997 focused using
three different sensors individually to examine performance
of sensors independently of one another.
- Passive
infra-red(PIR) with a relatively narrow cone-shaped zone
of protection
- Combination
Doppler shift microwave and passive infra-red(MW/PIR)
- Combination
Doppler shift and reflected power microwave(MW/PRES)
A total
of 822 subject approach passes were completed. With each sensor,
test subjects approached at differing angles including perpendicular
to power take-off shaft and at angles +/- 40 degrees from
perpendicular. These three approach angles were repeated for
two clothing styles including typical summer and winter wear.
In these 822 passes, there were no sensor "misses."
No false alarms occurred during the subject approach test
passes.
Relatively
few alarm events were generated during tests for false trigger
susceptibility. As long as the tractor was not rolling over
the ground, all three sensors were surprisingly immune to
engine vibration, operator activity, PTO shaft rotation, and
objects tossed through the protected area.
Clothing
had little effect on sensor performance as can be seen in
summary Table 2 which shows the distance from the hazard at
the time of detection for varying clothing styles and angles
for each of the three sensors tested. Note however, that the
angle of approach has an impact on detector performance, probably
due to differences in sensor field geometry.
| Table
2
Inches
from Hazard
|
|
|
|
|
|
|
|
| Clothing
Style |
Light |
Light |
Light |
Heavy |
Heavy |
Heavy |
|
| Approach
Angle |
-50 |
-90 |
-130 |
-50 |
-90 |
-130 |
Average
By Sensor across angles & clothing types |
| PIR |
41.6 |
30.1 |
32.5 |
39.8 |
35.2 |
29.6 |
34.8 |
| MW/PIR |
45.2 |
33.2 |
26.9 |
43.0 |
35.6 |
28.8 |
35.4 |
| MW/PRES |
33.9 |
52.4 |
45.6 |
32.1 |
47.7 |
43.1 |
42.5 |
| By
angles&clothing across sensor types |
40.2 |
38.6 |
35.0 |
38.3 |
39.5 |
33.9 |
|
| Readings
for both clothing types averaged over sensors&angles |
|
|
37.9 |
|
|
37.2 |
|
Additional
tests were performed in 1997 on configurations of multiple
sensors in which various sensor outputs were logically ANDed,
requiring all to trigger to generate an alarm event. In these
modes the system performs very well, but detection performance
is limited by the slowest acting sensor. It appears that when
performance tests are conducted in ideal conditions such as
those reported here, the added redundancy of multiple sensors
might not be necessary to reduce false alarms.
The system
has been modified to allow relative timing, in addition to
boolean combination, of the sensor outputs to be used as alarm
criteria. More aggressive testing for false alarms is planned.
Additional narrow field PIR and MW/PRES sensors have been
acquired and are being tested. The most promising configurations
use a wide field MW/PRES sensor on the tractor centerline
with a a narrow field PIR or MW/PRES sensor on either side.
This
work represents an important first step toward the development
of a human presence sensing system that may have potential
for field applications. The two sensing technologies tested
together provide the overlap necessary to significantly reduce
false alarms and misses in agricultural work environments.
However, additional research is needed to further develop
and refine individual sensing components and housings to assure
that they will withstand the environmental conditions and
use that they would receive over the life of a typical machine.
Hopefully,
additional work can be completed during the coming years in
cooperation with universities, equipment manufacturers, and
various public institutions and funding agencies with interests
in helping producers protect themselves from the dangers of
rotating equipment.
Funded
in part through Midwest Center for Agricultural Research,
Education, and Disease and Injury Prevention: A NIOSH/CDC
Cooperative Agreement Program, #U07/CCU507126-07.
Thanks
also to The National Farm Medicine Center, a department of
Marshfield Medical Research and Education Foundation, a division
of Marshfield Clinic in Marshfield, Wisconsin for their interest
and support of this project.
Disclaimer
and Reproduction Information: Information in NASD does not represent
NIOSH policy. Information included in NASD appears by permission
of the author and/or copyright holder. More
NASD Review: 04/2002
Email
comments to John Shutske
or Bill Gilbert
John
Shutske, Associate Professor, Bill Gilbert, Assistant Scientist,
Jonathan Chaplin, Associate Professor, Paul Gunderson, Director,
National Farm Medicine Center, Marshfield, WI
Last updated March 31, 1998 © 1997 Regents of the University
of Minnesota. All Rights Reserved.
The
University of
Minnesota is an equal opportunity educator and employer.
This
page is part of the Biosystems
and Agricultural Engineering Department web at http://www.bbe.umn.edu/
|



