

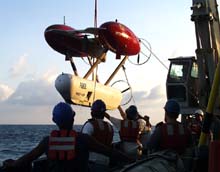
Image of WHOI's Autonomous Underwater Vehicle, the Autonomous Benthic Explorer (ABE) being deployed. Click image for larger view.
Autonomous Benthic Explorer (ABE)
The Autonomous Benthic Explorer, more commonly known as ABE is the first underwater robotic vehicle of its kind. ABE was designed and built at the Woods Hole Oceanographic Institution (WHOI) in the mid 1990’s. ABE weights approximately 1200 pounds and is a little over 2 meters long. ABE's top cruising speed is 2 knots.
As an Autonomous Underwater Vehicle (AUV), ABE is a true robot, able to move on its own without a pilot or tether to either ship or submersible. This gives ABE the advantage of covering large areas of underwater terrain. ABE was invented to address scientists' frequent need to monitor underwater areas over long periods of time, a job that can be very expensive using surface ships and manned submersibles for repeated visits. ABE is designed to perform a predetermined set of maneuvers, take photographs, and collect data and samples within an area about the size of a city block. After accomplishing its mission, ABE “goes to sleep,” conserving its power supply for months at a time, allowing for future missions without recharging its batteries.
ABE was developed by a team of engineers, who assembled what might be called the robot's body (frame and housings), muscles (thrusters), nerves (cabling and power to operate the motors, cameras, and sensors), and brain (computer systems for powering up and down and to determining where ABE should go and when to take measurements). Each of these components presented a complex design challenge. The final design allows scientists to program ABE to maneuver independently in three dimensions, and at a range of speeds. These features allow ABE to follow the contours of underwater mountain ranges, fly around sheer pinnacles, and dive into narrow trenches.

ABE's primary data collection tools are housed in the lowest of its three torpedo shaped pods, which is sealed. The two upper pods are free flooded and contain glass flotation balls. Click image for larger view.
Currently, ABE follows a set of instructions placed in its memory before deployment, and its data is accessible only after the robot is recovered. However, its developers envision the not-too-distant day when underwater acoustic transmission systems will allow scientists anywhere in the world to receive video and data from ABE, and to control its movements and sampling from their home laboratories
The Hardest Worker on Board
ABE is often deployed for long hours at extreme depths. ABE can survey bottom environments at depths of 5000 meters with a variety of sensors and tools. ABE carries a full complement of scientific survey equipment including: conductivity and temperature probes, a depth recorder, video cameras, and a magnetometer to measure magnetic fields. ABE is also equipped with sonar for advanced mapping, as well as geological sampling tools.
To obtain samples from the sea bottom, ABE can be fitted with a device called a wax core sampler. Wax coring works by pressing a heavy weight with sticky wax on its bottom onto the seafloor. Rock or sediment stick to the wax and can be brought on board ABE's tending ship at the surface. This process is improved using ABE's precise navigation and video documentation tools to record the sampling process and document the surrounding seafloor.
ABE is often deployed prior to a manned submersible mission to provide detailed information to the pilot on their target destination(s). Click image for larger view.
To ensure precise navigational control, ABE is outfitted with two separate and complementary navigational systems. In addition to bathymetry, ABE has handled the difficult job of “temperature mapping”. Hydrothermal vent fields are located by changes in water temperature, called plumes, due to the high volume of heated water created at vent sites. By swimming along a programmed track, ABE can record temperatures along way and produce a thermal map of an area. This gives scientists the ability to concentrate on “hot-spots” and reduces the time needed to do ship surveys of a plume field.
ABE costs approximately $3,000 per day to operate. While it is relatively inexpensive to operate ABE itself, each deployment requires mobilization to the site, technicians and engineers to maintain ABE as well as data managers to download ABE’s data banks for processing.
You can learn more about the AUV ABE at WHOI's website: http://dsg.whoi.edu:90/ships/auvs/abe_description.htm











