End-to-end system demonstration and validation of formation flying algorithms, scalable to flight, within a ground-based test environment
Objectives
The Formation Control Testbed (FCT) was built to provide an end-to-end autonomous formation flying system in a ground-based laboratory. The FCT provides an environment for system-level demonstration and validation of formation control algorithms. The algorithms are validated using multiple floating test robots that emulate real spacecraft dynamics. The goal is to demonstrate algorithms for formation acquisition, formation maneuvering, fault-tolerant operations, as well as collision-avoidance maneuvering.
Testbed Description
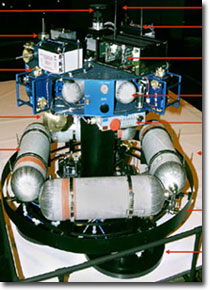
The FCT is comprised of two robots with flight-like hardware and dynamics, a precision flat floor for the robots to operate on, ceiling-mounted artificial stars for robot attitude sensing and navigation, and a "ground control" room for commanding the robots and receiving telemetry. The robots and part of the flat floor are shown in Figure 1. A detailed view of a robot with specific hardware identified is given in Figure 2. The layout of the FCT emulates the environment of a formation of telescopes that is restricted to maneuvering in the same plane in space, normal to the direction of the target star.
To be as flight-like as possible, each robot is equipped with a typical single-spacecraft attitude control suite of reaction wheels, gyros, and a star tracker. Thrusters are also available for attitude control. Each robot has a lower translational platform and an upper attitude platform. The attitude platform is the "spacecraft" and is completely disconnected from the translational platform.
- The attitude platform/spacecraft houses the avionics, actuators, sensors, inter-robot and "ground"-to-robot wireless communication antennae, and the spacecraft processors.
- The translational platform provides both translational and rotational degrees of freedom to the attitude platform via (i) linear air bearings (the black, circular pads at the base of each robot) that allow the entire robot to float freely on the flat floor, and (ii) a spherical air bearing at the top of the vertical stage (the black, vertical cylinders).
Each robot therefore has five degrees-of-freedom: two in translation and three in rotation. The robots can translate wherever necessary on the flat floor; however, the pitch and roll axes of each robot's motion are limited to ±30° (a physical limitation of the spherical air bearings). The formation algorithms are designed for all six degrees-of-freedom, and for the vertical translational degree of freedom, telescoping vertical stages with 0.5 m of travel are being retrofitted in 2008. The vertical air bearing will have a range of ±25 cm.
The FCT is housed in the former Celestarium, which had been used to calibrate star trackers. The FCT has a 40 ft. diameter circular floor space and a 25 ft. high, dome-like ceiling. This ceiling is ideal for mounting artificial reference stars. The precision flat floor that the robots operate on is contained within the 40 ft. diameter floor space. The flat floor consists of fourteen 4 ft. x 12 ft. metal panels ground to a flatness of 0.002 in. Each panel is mounted on a support structure that has coarse and vernier leveling screws. Periodic laser surveys of the floor are used to ensure that the steps between the panels are less than 0.001 inch and the floor slope is less than 120 microradians. The resulting 7.3 m x 8.5 m flat floor is sufficient to demonstrate nominal TPF-I formation maneuvers, such as formation rotations and collision avoidance.
To provide artificial stars, down-looking infrared LEDs are mounted on the ceiling of the Celestarium. The star tracker on each robot measures the direction (two angles) to at least three stars. From this information, the attitude and position of a robot can be determined with respect to the "inertial" Room Frame. The position of a robot can also be determined because the stars are in the near-field, and hence, the direction to an LED changes as a robot moves.
The principal investigator of the Formation Control Testbed is Dr. Daniel Scharf at the Jet Propulsion Laboratory.
| Table 1. Formation Control Testbed |
| Planned Activities |
Performance Targets |
| Formation flying demonstration with 2 robots |
Control to 5 cm position |
| Formation flying demonstration with 3 robots |
Control to 5 cm position |
| Formation flying demonstration with multiple robots and with fault recovery |
Successful recovery to safe mode for all simulated fault cases |
|
Results
In 2007 the Formation Control Testbed demonstrated precision maneuvers using two robots, showing autonomous initialization, maneuvering, and operation in a collision free manner. The key maneuver that was demonstrated was representative of TPF-I science observations. Repeated experiments with the robots demonstrated formation rotations through greater than 90° at ten times the flight rotation rate while maintaining a relative position control to 5 cm rms. Although the achievable resolution in these experiments was limited by the noise environment of the laboratory, it was nonetheless demonstrated (through modeling) that in the relatively noise-free environment of space, the performance of these algorithms would exceed TPF-I flight requirements.
Timeline
Planning for the Formation Control Testbed began in 2003. The first robot for the FCT was commissioned in September 2004 and the second in January 2006. In May 2006 the integration of the FACS software was successfully completed for the robots, enabling them to operate in a formation mode for the first time. In late 2006 and early 2007 the robots underwent extensive hardware upgrades in preparation for their performance milestone, described previously. The experiments for that milestone were conducted in September 2007. In November 2007 the first vertical stage was commissioned for one of the robots. The vertical stage for the second robot is anticipated in June of 2008. The research sponsored by NASA for TPF was concluded in January 2008. The Formation Control Testbed continues to be developed in support of DARPA and its F-6 Program.
Future Technology Development
The two flight-like robots of the FCT have now demonstrated precision formation control for synchronized rotations. This is representative of the highest precision maneuver needed for TPF-I, with performance traceable to flight. The next steps for technology maturation that could be done using the robots within the FCT include demonstrating new capabilities such as (1) reactive collision avoidance, (2) formation fault detection, and (3) autonomous reconfiguration and retargeting maneuvers. Using the real-time simulation environment of FAST we would also need to demonstrate the performance with full formation-flight complexity, that is with five interacting spacecraft showing synchronized rotations, autonomous reconfigurations, fault detection, and collision avoidance.
The greatest advance in maturing technology for formation flying would be to have a modest-scale technology mission devoted to verifying and validating guidance and control algorithms such as those developed through the FCT. In 2009 the Swedish Space Agency's Prisma mission will test out RF metrology designed for ESA's Darwin mission. Around 2012 ESA's Proba-3 mission will test optical metrology loops intended for future X-ray missions.
A ground-based facility such as the FCT will provide the means to test and improve real-time formation-flying algorithms as the technology matures, and even while the technology is proven in space. Although two-spacecraft precision maneuvers were demonstrated in 2007, a major goal that remains is to demonstrate robust algorithms for three or more spacecraft, such as would be used by TPF-I.

References
Daniel P. Scharf, Fred Y. Hadaegh, Jason A. Keim, Edward G. Benowitz, and Peter R. Lawson "Flight-like ground demonstration of precision formation flying spacecraft," in Techniques and Instrumentation for Exoplanets III, edited by D. R. Coulter, Proc. SPIE Vol. 6693, 669307 (SPIE, Bellingham, WA, 2007).
Regehr, M.W., Acikmese, A.B., Ahmed, A., Aung, M., Bailey, R., Bushnell, C., Clark, K.C., Hicke, A., Lytlel, B., MacNeal, P., Rasmussen, R.E., Shields, J., and Singh, G., "The Formation Control Testbed," IEEE Aerospace Conference, Big Sky, MT, 2004.
Scharf, D.P., Hadaegh, F.Y., Rahman, Z.R., Shields, J.H., Singh, G., and Wette, M.R., "An Overview of the Formation and Attitude Control System for the Terrestrial Planet Finder Formation Flying Interferometer," 2nd International Symposium on Formation Flying Missions and Technologies, Washington, D.C., September, 2004.